StabilizerStandingState.h File Reference
#include <mc_control/fsm/State.h>#include <mc_planning/Pendulum.h>#include <mc_tasks/lipm_stabilizer/Contact.h>
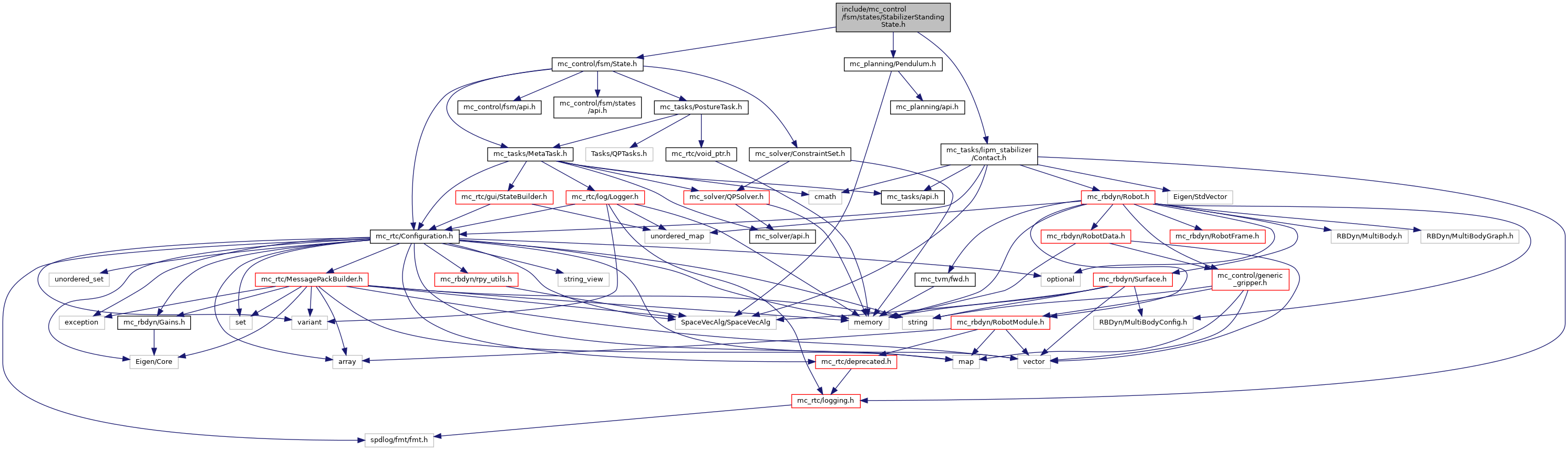
Include dependency graph for StabilizerStandingState.h:
Go to the source code of this file.
Classes | |
| struct | mc_control::fsm::StabilizerStandingState |
| Simple state to control and stabilize the CoM of a biped-like robot using the LIPMStabilizer. More... | |
Namespaces | |
| mc_tasks | |
| mc_tasks::lipm_stabilizer | |
| mc_control | |
| mc_control::fsm | |