configuration_io.h File Reference
#include <mc_rtc/Configuration.h>#include <mc_rbdyn/Base.h>#include <mc_rbdyn/BodySensor.h>#include <mc_rbdyn/Collision.h>#include <mc_rbdyn/Flexibility.h>#include <mc_rbdyn/ForceSensor.h>#include <mc_rbdyn/JointSensor.h>#include <mc_rbdyn/PolygonInterpolator.h>#include <mc_rbdyn/RobotModule.h>#include <mc_rbdyn/Springs.h>#include <mc_rbdyn/polygon_utils.h>#include <Tasks/QPTasks.h>#include <mc_rbdyn/CylindricalSurface.h>#include <mc_rbdyn/GripperSurface.h>#include <mc_rbdyn/PlanarSurface.h>#include <sch-core/S_Object.h>#include <mc_rbdyn/Contact.h>#include <mc_rtc/logging.h>#include <fstream>
Include dependency graph for configuration_io.h:

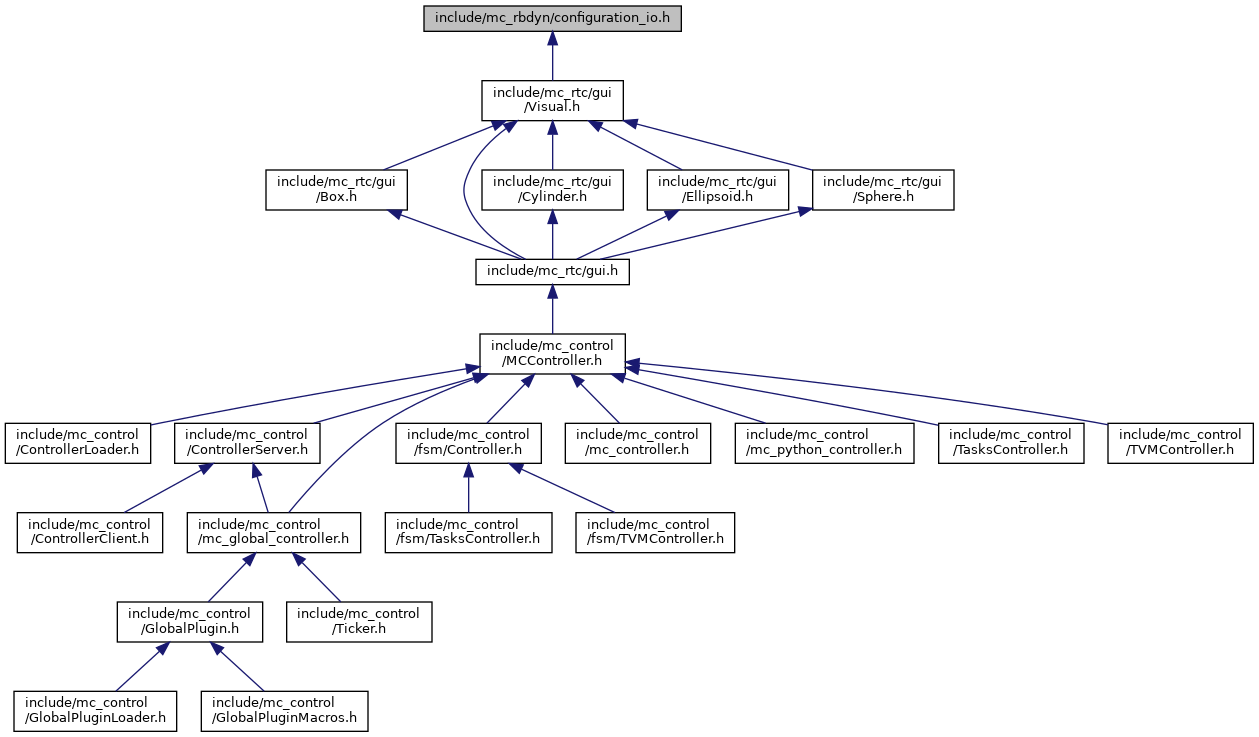
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mc_rtc::ConfigurationLoader< mc_rbdyn::RobotModule > |
| struct | mc_rtc::ConfigurationLoader< mc_rbdyn::RobotModulePtr > |
| struct | mc_rtc::ConfigurationLoader< mc_rbdyn::Contact > |
Namespaces | |
| mc_rtc | |
Macros | |
| #define | DECLARE_IO(...) |
Macro Definition Documentation
◆ DECLARE_IO
| #define DECLARE_IO | ( | ... | ) |
Value:
template<> \
struct MC_RBDYN_DLLAPI ConfigurationLoader<__VA_ARGS__> \
{ \
};
void load(Archive &ar, Eigen::Matrix< _Scalar, _Rows, _Cols, _Options, _MaxRows, _MaxCols > &m, const unsigned int)
void save(Archive &ar, const Eigen::Matrix< _Scalar, _Rows, _Cols, _Options, _MaxRows, _MaxCols > &m, const unsigned int)
Simplify access to values hold within a JSON file.
Definition: Configuration.h:166