RobotModule.h File Reference
#include <mc_rbdyn/BodySensor.h>#include <mc_rbdyn/Collision.h>#include <mc_rbdyn/CompoundJointConstraintDescription.h>#include <mc_rbdyn/Flexibility.h>#include <mc_rbdyn/ForceSensor.h>#include <mc_rbdyn/JointSensor.h>#include <mc_rbdyn/Mimic.h>#include <mc_rbdyn/RobotConverterConfig.h>#include <mc_rbdyn/Springs.h>#include <mc_rbdyn/api.h>#include <mc_rbdyn/lipm_stabilizer/StabilizerConfiguration.h>#include <mc_rtc/constants.h>#include <mc_rtc/deprecated.h>#include <RBDyn/parsers/common.h>#include <sch/S_Object/S_Object.h>#include <array>#include <map>#include <vector>
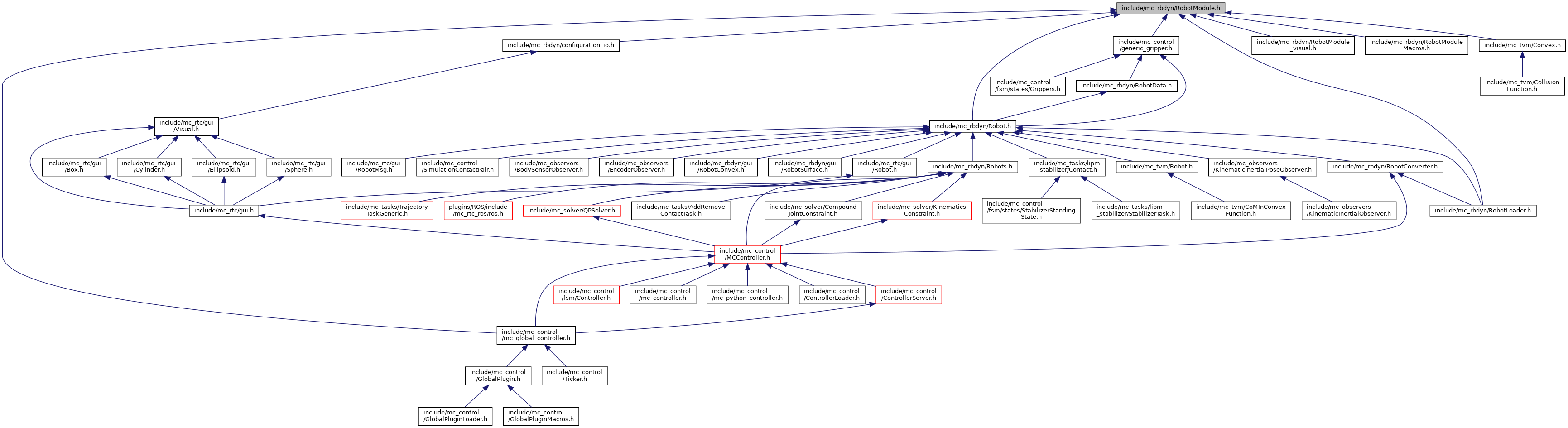
Include dependency graph for RobotModule.h:

This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mc_rbdyn::DevicePtrVector |
| struct | mc_rbdyn::VisualMap |
| struct | mc_rbdyn::RobotModule |
| struct | mc_rbdyn::RobotModule::Gripper |
| struct | mc_rbdyn::RobotModule::Gripper::Safety |
| struct | mc_rbdyn::RobotModule::FrameDescription |
Namespaces | |
| mc_rbdyn | |
Macros | |
| #define | ROBOT_MODULE_API |
Typedefs | |
| using | mc_rbdyn::S_ObjectPtr = std::shared_ptr< sch::S_Object > |
| typedef std::shared_ptr< RobotModule > | mc_rbdyn::RobotModulePtr |
| using | mc_rbdyn::RobotModuleVector = std::vector< RobotModule, Eigen::aligned_allocator< RobotModule > > |
Functions | |
| MC_RBDYN_DLLAPI RobotModule::bounds_t | mc_rbdyn::urdf_limits_to_bounds (const rbd::parsers::Limits &limits) |
| Converts limits provided by RBDyn parsers to bounds. More... | |
| MC_RBDYN_DLLAPI bool | mc_rbdyn::check_module_compatibility (const RobotModule &lhs, const RobotModule &rhs) |
| bool | mc_rbdyn::operator== (const RobotModule::Gripper::Safety &lhs, const RobotModule::Gripper::Safety &rhs) |
| bool | mc_rbdyn::operator== (const RobotModule::Gripper &lhs, const RobotModule::Gripper &rhs) |
Macro Definition Documentation
◆ ROBOT_MODULE_API
| #define ROBOT_MODULE_API |