Contact.h File Reference
#include <mc_rbdyn/api.h>#include <mc_rtc/Configuration.h>#include <Tasks/QPContacts.h>#include <SpaceVecAlg/SpaceVecAlg>#include <memory>
Include dependency graph for Contact.h:

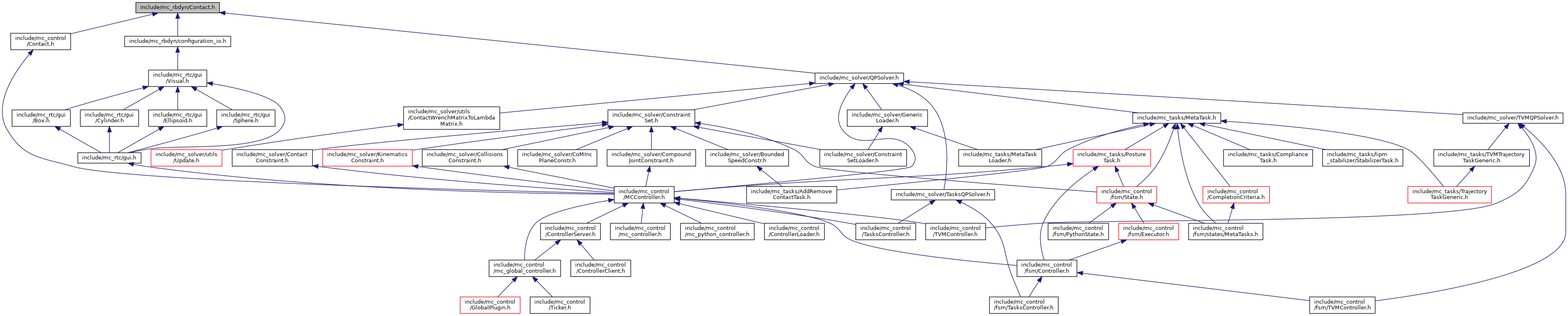
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mc_solver::QPContactPtr |
| struct | mc_solver::QPContactPtrWPoints |
| struct | mc_rbdyn::Contact |
Namespaces | |
| mc_solver | |
| mc_rbdyn | |
Functions | |
| MC_RBDYN_DLLAPI std::vector< sva::PTransformd > | mc_rbdyn::computePoints (const mc_rbdyn::Surface &robotSurface, const mc_rbdyn::Surface &envSurface, const sva::PTransformd &X_es_rs) |