mc_solver::utils::Constraint< ConstraintT, UpdateT > Class Template Reference
#include <mc_solver/utils/Constraint.h>
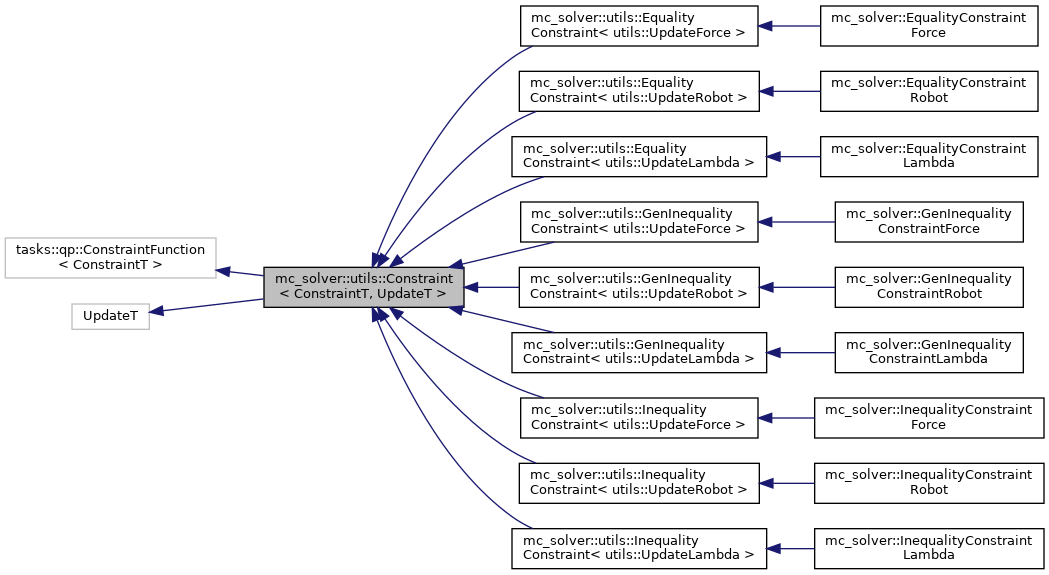
Inheritance diagram for mc_solver::utils::Constraint< ConstraintT, UpdateT >:
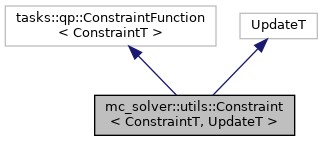
Collaboration diagram for mc_solver::utils::Constraint< ConstraintT, UpdateT >:
Protected Member Functions | |
| template<typename U = UpdateT, typename = typename std::enable_if<std::is_same<U, utils::UpdateRobot>::value>::type> | |
| Constraint (unsigned int rIndex) | |
| template<typename U = UpdateT, typename = typename std::enable_if<std::is_same<U, utils::UpdateLambda>::value>::type> | |
| Constraint (const tasks::qp::ContactId &cid) | |
| template<typename U = UpdateT, typename = typename std::enable_if<std::is_same<U, utils::UpdateForce>::value>::type> | |
| Constraint (const mc_solver::QPSolver &solver, const tasks::qp::ContactId &cid) | |
| virtual | ~Constraint () |
| void | updateNrVars (const std::vector< rbd::MultiBody > &mbs, const tasks::qp::SolverData &data) override |
| void | update (const std::vector< rbd::MultiBody > &mbs, const std::vector< rbd::MultiBodyConfig > &mbcs, const tasks::qp::SolverData &data) override |
Detailed Description
template<typename ConstraintT, typename UpdateT>
class mc_solver::utils::Constraint< ConstraintT, UpdateT >
Generic helper class to write a new constraint for Tasks.
- See also
- EqualityConstraint,
- InequalityConstraint and
- GenInequalityConstraint for details on specific constraints you can implement based on this helper
- Template Parameters
-
ConstraintT Type of tasks::qp constraint UpdateT Type of utils::Update we will use
Constructor & Destructor Documentation
◆ Constraint() [1/3]
template<typename ConstraintT , typename UpdateT >
template<typename U = UpdateT, typename = typename std::enable_if<std::is_same<U, utils::UpdateRobot>::value>::type>
|
inlineexplicitprotected |
◆ Constraint() [2/3]
template<typename ConstraintT , typename UpdateT >
template<typename U = UpdateT, typename = typename std::enable_if<std::is_same<U, utils::UpdateLambda>::value>::type>
|
inlineexplicitprotected |
◆ Constraint() [3/3]
template<typename ConstraintT , typename UpdateT >
template<typename U = UpdateT, typename = typename std::enable_if<std::is_same<U, utils::UpdateForce>::value>::type>
|
inlineprotected |
◆ ~Constraint()
template<typename ConstraintT , typename UpdateT >
|
inlineprotectedvirtual |
Virtual destructor
Member Function Documentation
◆ update()
template<typename ConstraintT , typename UpdateT >
|
inlineoverrideprotected |
◆ updateNrVars()
template<typename ConstraintT , typename UpdateT >
|
inlineoverrideprotected |
The documentation for this class was generated from the following file:
- include/mc_solver/utils/Constraint.h