#include <mc_solver/utils/Update.h>
|
| | UpdateForce (const mc_solver::QPSolver &solver, const tasks::qp::ContactId &cid) |
| |
| void | updateImpl (const std::vector< rbd::MultiBody > &, const std::vector< rbd::MultiBodyConfig > &, const tasks::qp::SolverData &) |
| |
| | Update (unsigned int rIndex) |
| |
| | Update (const tasks::qp::ContactId &cid) |
| |
| virtual | ~Update () |
| |
| virtual void | compute ()=0 |
| |
| virtual const Eigen::MatrixXd & | A () const=0 |
| |
| void | updateImpl (const std::vector< rbd::MultiBody > &, const std::vector< rbd::MultiBodyConfig > &, const tasks::qp::SolverData &) |
| |
| | UpdateNrVarsLambda (const tasks::qp::ContactId &cid) |
| |
| void | updateNrVarsImpl (const std::vector< rbd::MultiBody > &mbs, const tasks::qp::SolverData &data) |
| |
◆ UpdateForce()
| mc_solver::utils::UpdateForce::UpdateForce |
( |
const mc_solver::QPSolver & |
solver, |
|
|
const tasks::qp::ContactId & |
cid |
|
) |
| |
|
protected |
◆ updateImpl()
| void mc_solver::utils::UpdateForce::updateImpl |
( |
const std::vector< rbd::MultiBody > & |
, |
|
|
const std::vector< rbd::MultiBodyConfig > & |
, |
|
|
const tasks::qp::SolverData & |
|
|
) |
| |
|
protected |
The documentation for this struct was generated from the following file:
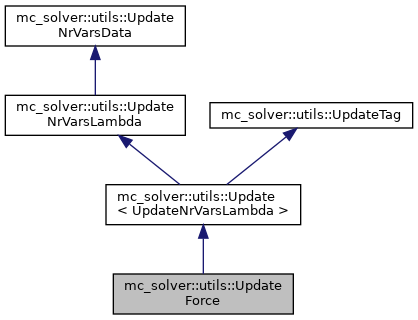
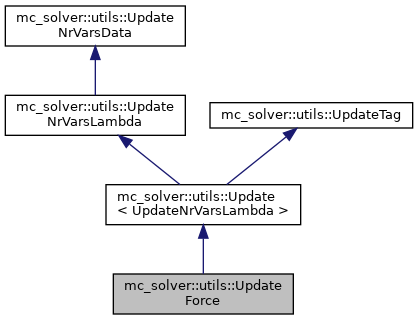
 Protected Member Functions inherited from mc_solver::utils::Update< UpdateNrVarsLambda >
Protected Member Functions inherited from mc_solver::utils::Update< UpdateNrVarsLambda >