|
| EIGEN_MAKE_ALIGNED_OPERATOR_NEW | AdmittanceTask (const mc_rbdyn::RobotFrame &frame, double stiffness=5.0, double weight=1000.0, bool showTarget=true, bool showPose=true) |
| | Initialize a new admittance task. More...
|
| |
| | AdmittanceTask (const std::string &robotSurface, const mc_rbdyn::Robots &robots, unsigned robotIndex, double stiffness=5.0, double weight=1000.0, bool showTarget=true, bool showPose=true) |
| | Initialize a new admittance task. More...
|
| |
| void | reset () override |
| | Reset the task. More...
|
| |
| const sva::ForceVecd & | admittance () const |
| | Get the admittance coefficients of the task. More...
|
| |
| void | admittance (const sva::ForceVecd &admittance) |
| | Set the admittance coefficients of the task. More...
|
| |
| sva::PTransformd | surfacePose () const |
| | Get the current pose of the control frame in the inertial frame. More...
|
| |
| sva::PTransformd | targetPose () |
| | Get the target pose of the control frame in the world frame. More...
|
| |
| void | targetPose (const sva::PTransformd &X_0_target) |
| | Set target pose (position and orientation) of the frame in the world frame. More...
|
| |
| sva::PTransformd | poseError () |
| | Transform from current frame pose to target. More...
|
| |
| const sva::ForceVecd & | targetWrench () const |
| | Get the target wrench in the control frame. More...
|
| |
| void | targetWrenchW (const sva::ForceVecd &wrenchW) |
| | Set the target wrench in world frame. More...
|
| |
| void | targetWrench (const sva::ForceVecd &wrench) |
| | Set the target wrench in the control frame. More...
|
| |
| sva::ForceVecd | measuredWrench () const |
| | Get the measured wrench in the control frame. More...
|
| |
| void | maxLinearVel (const Eigen::Vector3d &maxLinearVel) |
| | Set the maximum translation velocity of the task. More...
|
| |
| const Eigen::Vector3d & | maxLinearVel () const noexcept |
| |
| void | maxAngularVel (const Eigen::Vector3d &maxAngularVel) |
| | Set the maximum angular velocity of the task. More...
|
| |
| const Eigen::Vector3d & | maxAngularVel () const noexcept |
| |
| void | velFilterGain (double gain) |
| | Set the gain of the low-pass filter on the reference velocity. More...
|
| |
| double | velFilterGain () const noexcept |
| | Return the gain of the low-pass filter on the reference velocity. More...
|
| |
| void | refVelB (const sva::MotionVecd &velB) |
| | Set the reference body velocity. More...
|
| |
| void | load (mc_solver::QPSolver &solver, const mc_rtc::Configuration &config) override |
| | Load parameters from a Configuration object. More...
|
| |
| | TransformTask (const mc_rbdyn::RobotFrame &frame, double stiffness=2.0, double weight=500.0, bool showTarget=true, bool showPose=true) |
| | Constructor. More...
|
| |
| | TransformTask (const std::string &surfaceName, const mc_rbdyn::Robots &robots, unsigned int robotIndex, double stiffness=2.0, double weight=500, bool showTarget=true, bool showPose=true) |
| | Constructor. More...
|
| |
| void | reset () override |
| | Reset the task. More...
|
| |
| virtual sva::PTransformd | target () const |
| | Get the task's target. More...
|
| |
| virtual void | target (const sva::PTransformd &worldPos) |
| | Set the task's target. More...
|
| |
| virtual void | targetVel (const sva::MotionVecd &worldVel) |
| | Get the task's target velocity. More...
|
| |
| void | targetSurface (unsigned int robotIndex, const std::string &surfaceName, const sva::PTransformd &offset=sva::PTransformd::Identity()) |
| | Targets a robot surface with an optional offset. The offset is expressed in the target contact frame. More...
|
| |
| void | targetFrame (const mc_rbdyn::Frame &targetFrame, const sva::PTransformd &offset=sva::PTransformd::Identity()) |
| | Targets a given frame with an optional offset. More...
|
| |
| void | targetFrameVelocity (const mc_rbdyn::Frame &targetFrame, const sva::PTransformd &offset=sva::PTransformd::Identity()) |
| | Targets a given frame velocity with an optional offset. More...
|
| |
| virtual void | target (const mc_rbdyn::Frame &frame, const sva::PTransformd &offset) |
| | Targets a given frame with an optional offset. More...
|
| |
| const std::string & | surface () const noexcept |
| | Retrieve the controlled frame name. More...
|
| |
| const mc_rbdyn::RobotFrame & | frame () const noexcept |
| | Return the controlled frame (const) More...
|
| |
| sva::PTransformd | surfacePose () const noexcept |
| |
| std::function< bool(const mc_tasks::MetaTask &task, std::string &)> | buildCompletionCriteria (double dt, const mc_rtc::Configuration &config) const override |
| |
| void | addToLogger (mc_rtc::Logger &logger) override |
| |
| void | setGains (const sva::MotionVecd &stiffness, const sva::MotionVecd &damping) |
| | Set dimensional stiffness and damping. More...
|
| |
| void | stiffness (const sva::MotionVecd &stiffness) |
| | Set dimensional stiffness. More...
|
| |
| sva::MotionVecd | mvStiffness () |
| | Get dimensional stiffness as a motion vector. More...
|
| |
| void | damping (const sva::MotionVecd &damping) |
| | Set dimensional damping. More...
|
| |
| sva::MotionVecd | mvDamping () |
| | Get dimensional damping as a motion vector. More...
|
| |
| void | refVelB (const sva::MotionVecd &velB) |
| | Set trajectory task's reference velocity from motion vector in frame coordinates. More...
|
| |
| sva::MotionVecd | refVelB () const |
| | Get reference velocity in frame coordinates as a motion vector. More...
|
| |
| void | refAccel (const sva::MotionVecd &accel) |
| | Set trajectory task's reference acceleration from motion vector. More...
|
| |
| void | load (mc_solver::QPSolver &solver, const mc_rtc::Configuration &config) override |
| | Load parameters from a Configuration object. More...
|
| |
| void | damping (double damping) |
| | Set the task damping, leaving its stiffness unchanged. More...
|
| |
| void | damping (const Eigen::VectorXd &damping) |
| | Set dimensional damping. More...
|
| |
| double | damping () const |
| | Get the current task damping. More...
|
| |
| void | setGains (double stiffness, double damping) |
| | Set both stiffness and damping. More...
|
| |
| void | setGains (const Eigen::VectorXd &stiffness, const Eigen::VectorXd &damping) |
| | Set dimensional stiffness and damping. More...
|
| |
| void | stiffness (double stiffness) |
| | Set the task stiffness/damping. More...
|
| |
| void | stiffness (const Eigen::VectorXd &stiffness) |
| | Set dimensional stiffness. More...
|
| |
| double | stiffness () const |
| | Get the current task stiffness. More...
|
| |
| | TrajectoryTaskGeneric (const mc_rbdyn::Robots &robots, unsigned int robotIndex, double stiffness, double weight) |
| | Constructor (auto damping) More...
|
| |
| | TrajectoryTaskGeneric (const mc_rbdyn::RobotFrame &frame, double stiffness, double weight) |
| | Constructor (auto damping) More...
|
| |
| virtual | ~TrajectoryTaskGeneric ()=default |
| |
| void | refVel (const Eigen::VectorXd &vel) |
| | Set the trajectory reference velocity. More...
|
| |
| const Eigen::VectorXd & | refVel () const |
| | Get the trajectory reference velocity. More...
|
| |
| void | refAccel (const Eigen::VectorXd &accel) |
| | Set the trajectory reference acceleration. More...
|
| |
| const Eigen::VectorXd & | refAccel () const |
| | Get the trajectory reference acceleration. More...
|
| |
| void | stiffness (double stiffness) |
| | Set the task stiffness/damping. More...
|
| |
| void | stiffness (const Eigen::VectorXd &stiffness) |
| | Set dimensional stiffness. More...
|
| |
| void | damping (double damping) |
| | Set the task damping, leaving its stiffness unchanged. More...
|
| |
| void | damping (const Eigen::VectorXd &damping) |
| | Set dimensional damping. More...
|
| |
| void | setGains (double stiffness, double damping) |
| | Set both stiffness and damping. More...
|
| |
| void | setGains (const Eigen::VectorXd &stiffness, const Eigen::VectorXd &damping) |
| | Set dimensional stiffness and damping. More...
|
| |
| double | stiffness () const |
| | Get the current task stiffness. More...
|
| |
| double | damping () const |
| | Get the current task damping. More...
|
| |
| const Eigen::VectorXd & | dimStiffness () const |
| | Get the current task dimensional stiffness. More...
|
| |
| const Eigen::VectorXd & | dimDamping () const |
| | Get the current task dimensional damping. More...
|
| |
| void | weight (double w) |
| | Set the task weight. More...
|
| |
| double | weight () const |
| | Returns the task weight. More...
|
| |
| void | dimWeight (const Eigen::VectorXd &dimW) override |
| | Set the task's dimension weight vector. More...
|
| |
| Eigen::VectorXd | dimWeight () const override |
| | Get the current task's dim weight vector. More...
|
| |
| void | selectActiveJoints (const std::vector< std::string > &activeJointsName, const std::map< std::string, std::vector< std::array< int, 2 >>> &activeDofs={}, bool checkJoints=true) |
| | Create an active joints selector. More...
|
| |
| void | selectActiveJoints (mc_solver::QPSolver &solver, const std::vector< std::string > &activeJointsName, const std::map< std::string, std::vector< std::array< int, 2 >>> &activeDofs={}) override |
| | Create an active joints selector. More...
|
| |
| void | selectUnactiveJoints (const std::vector< std::string > &unactiveJointsName, const std::map< std::string, std::vector< std::array< int, 2 >>> &unactiveDofs={}, bool checkJoints=true) |
| | Create an unactive joints selector. More...
|
| |
| void | selectUnactiveJoints (mc_solver::QPSolver &solver, const std::vector< std::string > &unactiveJointsName, const std::map< std::string, std::vector< std::array< int, 2 >>> &unactiveDofs={}) override |
| | Create an unactive joints selector. More...
|
| |
| virtual void | resetJointsSelector () |
| |
| void | resetJointsSelector (mc_solver::QPSolver &solver) override |
| | Reset active joints selection. More...
|
| |
| Eigen::VectorXd | eval () const override |
| | Returns the task error. More...
|
| |
| Eigen::VectorXd | speed () const override |
| | Returns the task velocity. More...
|
| |
| const Eigen::VectorXd & | normalAcc () const |
| |
| | MetaTask () |
| |
| virtual | ~MetaTask () |
| |
| const std::string & | type () const |
| |
| virtual void | name (const std::string &name) |
| |
| const std::string & | name () const |
| |
| size_t | iterInSolver () const noexcept |
| | Get the number of iterations since the task was added to the solver. More...
|
| |
| void | resetIterInSolver () noexcept |
| | Set the number of iterations since the task was added to the solver to zero. More...
|
| |
| void | incrementIterInSolver () noexcept |
| | Increment the number of iterations since the task was added to the solver. More...
|
| |
| Backend | backend () const noexcept |
| |
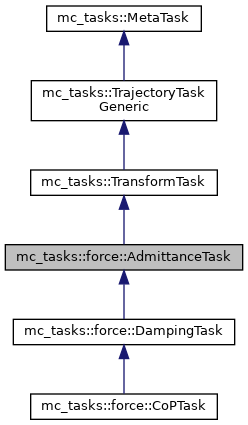
Hybrid position-force control on a contacting end-effector.
The AdmittanceTask is by default a TransformTask, i.e. pure position control of a frame. Admittance coefficients that map force errors to displacements (see [1] and [2]) are initially set to zero.
When the admittance along one axis (Fx, Fy, Fz, Tx, Ty or Tz) is set to a non-zero positive value, this axis switches from position to force control. The goal is then to realize the prescribed target wrench at the control frame (bis repetita placent: wrenches are expressed in the control frame of the task, not in the sensor frame of the corresponding body). The force control law applied is damping control [3].
See the discussion in [4] for a comparison with the ComplianceTask.
[1] https://en.wikipedia.org/wiki/Mechanical_impedance [2] https://en.wikipedia.org/wiki/Impedance_analogy [3] https://doi.org/10.1109/IROS.2010.5651082 [4] https://gite.lirmm.fr/multi-contact/mc_rtc/issues/34

 Public Member Functions inherited from mc_tasks::TransformTask
Public Member Functions inherited from mc_tasks::TransformTask